
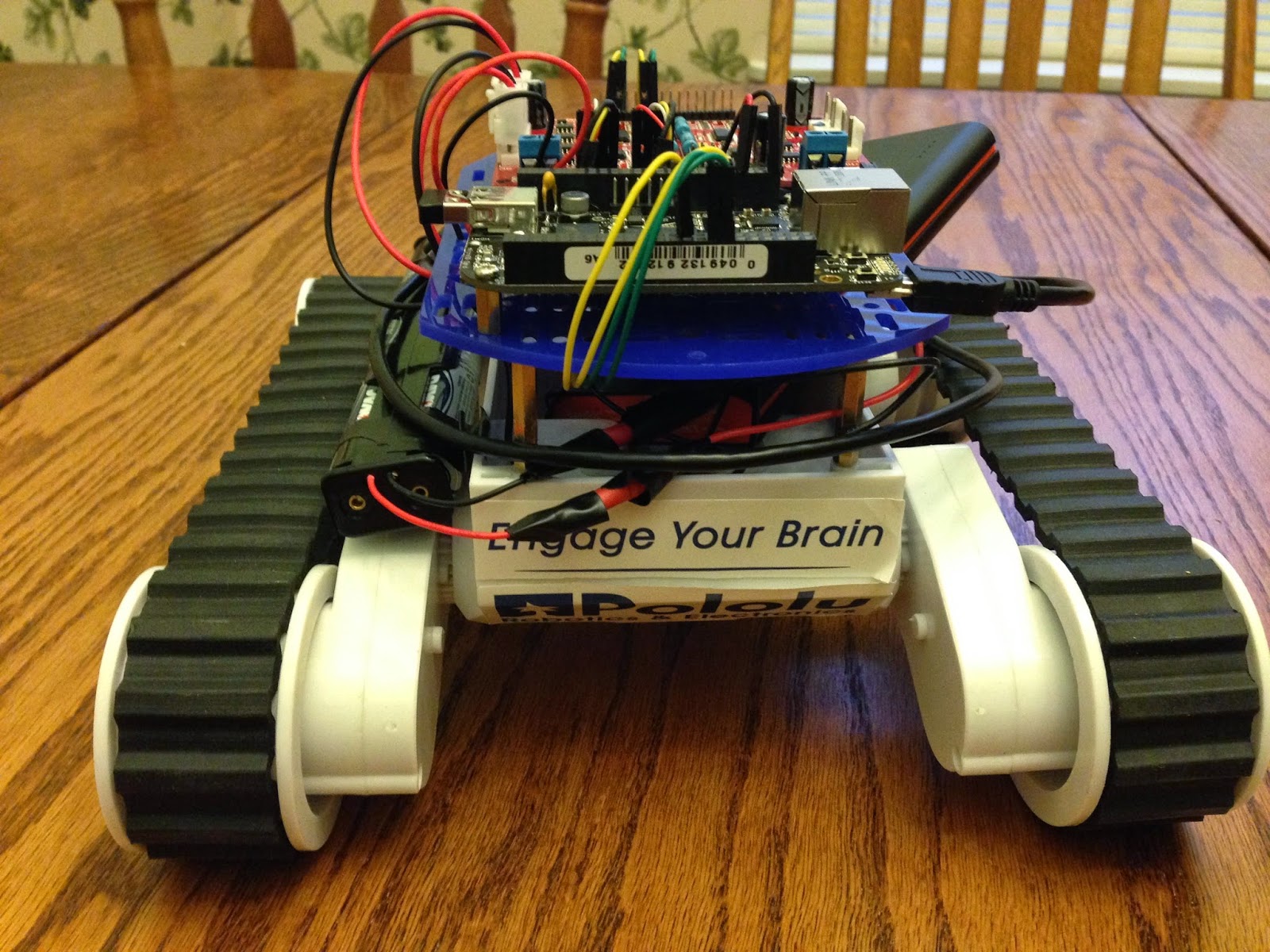
I successfully connected my BeagleBone Black running Angstrom Linux to a Dagu Rover 5 Tracked Chassis using the Rover 5 motor driver board. I then wrote Python client/server scripts that allowed me to control the robot over a Bluetooth RFComm connection. The blog posts listed below document the steps I took to create the robot, from start to finish, with videos and images.
I just got my BeagleBoard Black, now what?
My first working robot, It’s Alive
My first working robot, It’s Alive – Part 2
My first working robot, It’s Alive – Part 3




